基于整車變形補(bǔ)償?shù)幕炷帘密嚤奂苘壽E控制技術(shù)研究


發(fā)布日期:2016-05-25 來源:中國混凝土網(wǎng) 作者:趙鑫 萬梁 王佳茜 化世陽
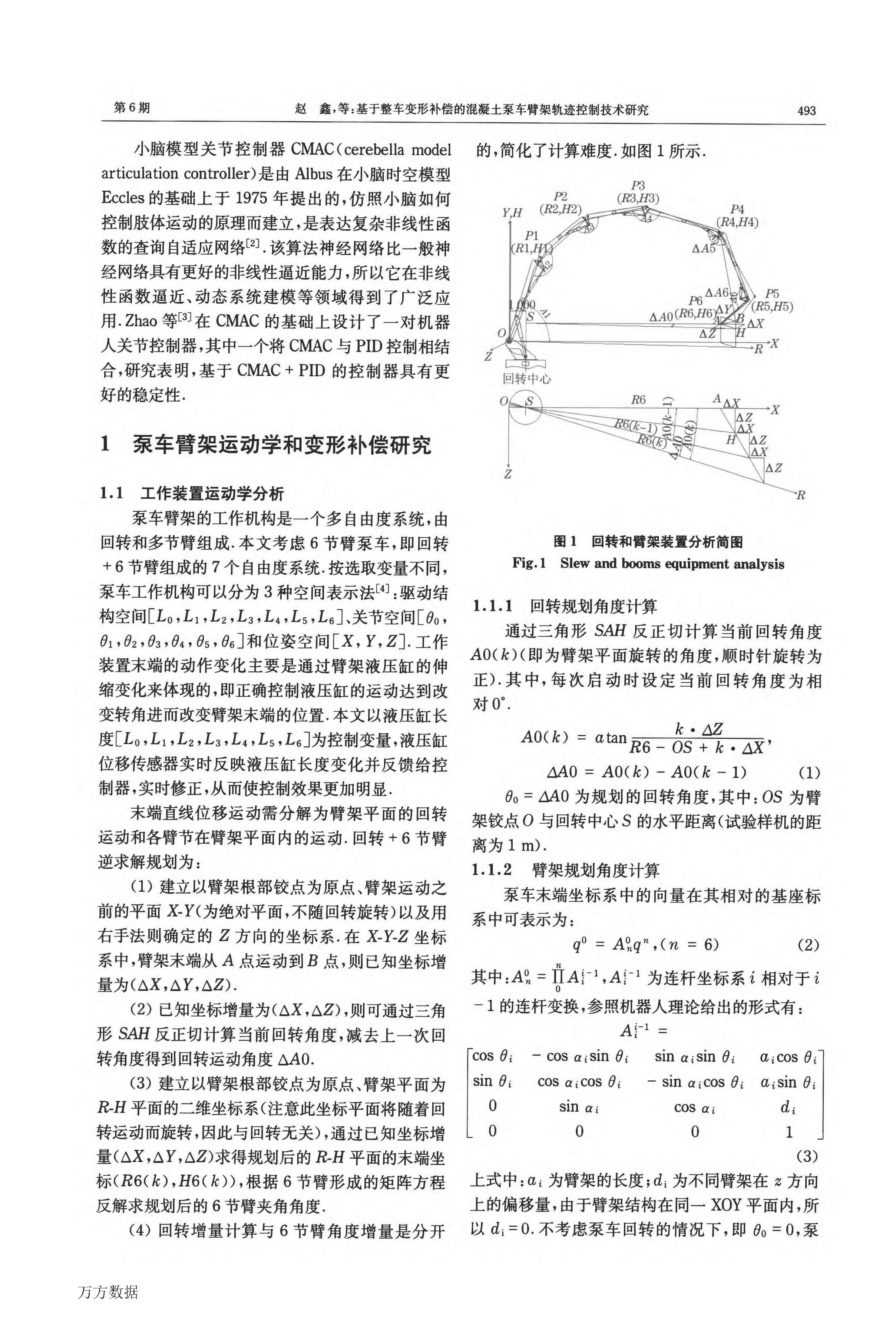
核心提示:為了使混凝土泵車工作裝置實(shí)現(xiàn)良好的控制精度和操作平穩(wěn)性,通過全姿態(tài)全工況下工作裝置的變形分析,得出臂架和車身變形補(bǔ)償模型,建立了變形補(bǔ)償后的泵車工作裝置運(yùn)動(dòng)學(xué)模型,并運(yùn)用小腦模型神經(jīng)網(wǎng)絡(luò)(CMAC)+ PID的控制方法解析動(dòng)作控制量,很好地解決了臂架位姿動(dòng)態(tài)檢測和軌跡控制的問題.試驗(yàn)結(jié)果表明,該控制算法能滿足軌跡控制的要求,使臂架末端位置動(dòng)態(tài)檢測誤差控制在±8cm之內(nèi);借助變形補(bǔ)償和臂架軌跡控制技術(shù),臂架末端的運(yùn)動(dòng)軌跡誤差可控制在±15 cm之內(nèi).
[ 技術(shù)搜索 ]
[ 加入收藏 ]
[ 告訴好友 ]
[ 打印本文 ]
[ 違規(guī)舉報(bào) ]
[ 關(guān)閉窗口 ]